Transport System¶
![\begin{align*}
\dot{x}(z,t) + v x'&(z,t) = 0 && z\in (0, l], t>0\\
x(z,0) &= x_0(z) && z\in [0,l]\\
x(0,t) &= u(t) && t>0\\
\end{align*}](../_images/math/0a8d6aa027ac4be88f926f0df0abe6127b77ef71.png)

 :
:
source code:
 (
(
from pyinduct.tests import test_examples
if __name__ == "__main__" or test_examples:
import pyinduct as pi
import numpy as np
import pyqtgraph as pg
sys_name = 'transport system'
v = 10
l = 5
T = 5
spat_domain = pi.Domain(bounds=(0, l), num=51)
temp_domain = pi.Domain(bounds=(0, T), num=1e2)
init_x = pi.Function(lambda z: 0)
init_funcs = pi.LagrangeFirstOrder.cure_interval(spat_domain)
func_label = 'init_funcs'
pi.register_base(func_label, init_funcs)
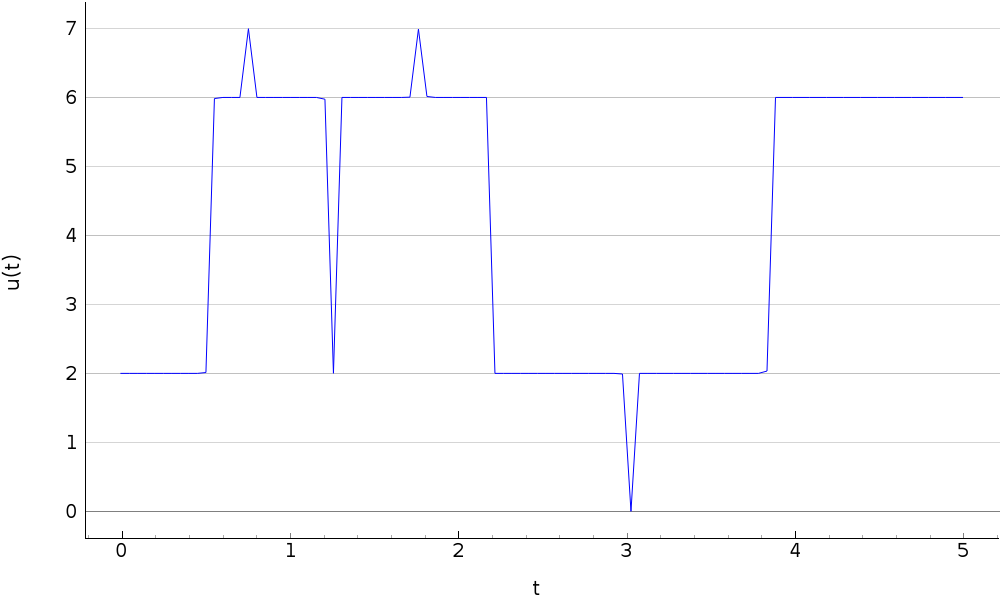
u = pi.SimulationInputSum([
pi.SignalGenerator('square', np.array(temp_domain), frequency=0.1,
scale=1, offset=1, phase_shift=1),
pi.SignalGenerator('square', np.array(temp_domain), frequency=0.2,
scale=2, offset=2, phase_shift=2),
pi.SignalGenerator('square', np.array(temp_domain), frequency=0.3,
scale=3, offset=3, phase_shift=3),
pi.SignalGenerator('square', np.array(temp_domain), frequency=0.4,
scale=4, offset=4, phase_shift=4),
pi.SignalGenerator('square', np.array(temp_domain), frequency=0.5,
scale=5, offset=5, phase_shift=5),
])
x = pi.FieldVariable(func_label)
phi = pi.TestFunction(func_label)
weak_form = pi.WeakFormulation([
pi.IntegralTerm(pi.Product(x.derive(temp_order=1), phi),
spat_domain.bounds),
pi.IntegralTerm(pi.Product(x, phi.derive(1)),
spat_domain.bounds,
scale=-v),
pi.ScalarTerm(pi.Product(x(l), phi(l)), scale=v),
pi.ScalarTerm(pi.Product(pi.Input(u), phi(0)), scale=-v),
], name=sys_name)
eval_data = pi.simulate_system(weak_form, init_x, temp_domain, spat_domain)
# pyqtgraph visualization
win0 = pg.plot(np.array(eval_data[0].input_data[0]).flatten(),
u.get_results(eval_data[0].input_data[0]).flatten(),
labels=dict(left='u(t)', bottom='t'), pen='b')
win0.showGrid(x=False, y=True, alpha=0.5)
# vis.save_2d_pg_plot(win0, 'transport_system')
win1 = pi.PgAnimatedPlot(eval_data,
title=eval_data[0].name,
save_pics=False,
labels=dict(left='x(z,t)', bottom='z'))
pi.show()
pi.tear_down((func_label,), (win0, win1))