R.a.d. eq. with dirichlet b.c. (fem approximation)¶
Simulation of the reaction-advection-diffusion equation with dirichlet boundary
condition by  and dirichlet actuation by
and dirichlet actuation by  .
.
![\begin{align*}
\dot{x}(z,t) = a_2x''&(z,t) + a_1x'(z,t) + a_0x(z,t) && z\in (0, l), t>0\\
x(z,0) &= x_0(z) && z\in [0,l]\\
x(0,t) &= 0 && t>0\\
x(l,t) &= u(t) && t>0
\end{align*}](../_images/math/bc65452766bfefd2a84e34fea6fc681c1ec82dbc.png)
example: heat equation

 –>
–> pyinduct.trajectory.RadTrajectory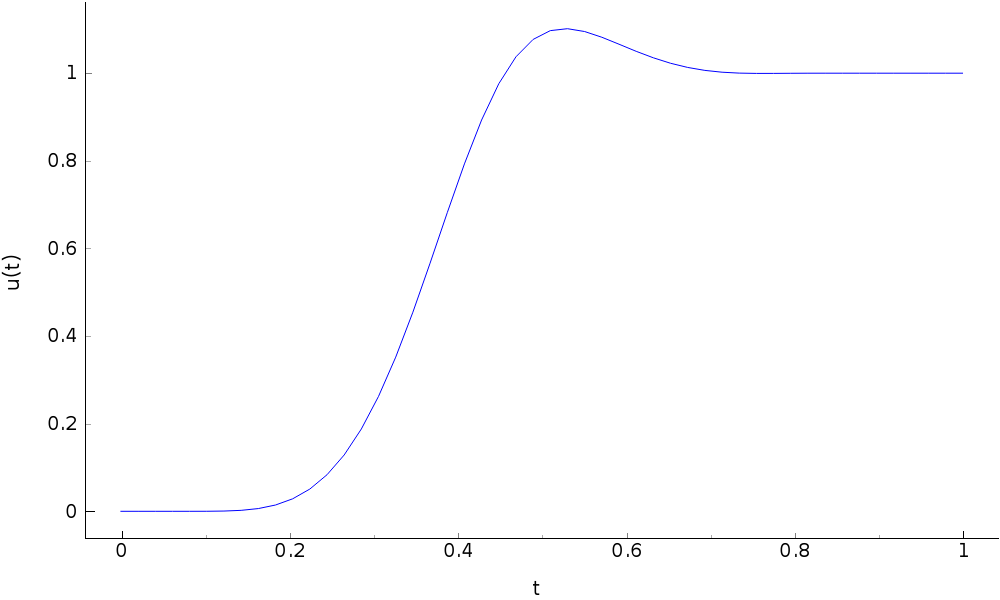


corresponding 3d plots
|
|
|
|
with:
inital functions

test functions

where the functions
 met the homogeneous b.c.
met the homogeneous b.c.
only
 can draw the actuation
can draw the actuationfunctions
e.g. from type pyinduct.shapefunctions.LagrangeFirstOrderorpyinduct.shapefunctions.LagrangeSecondOrder, seepyinduct.shapefunctions
approach:

- weak formulation…

- … and derivation shift to work with lagrange 1st order initial functions
![\begin{align*}
\langle\dot{x}(z,t),\varphi_j(z)\rangle &=
\overbrace{[a_2 [x'(z,t)\varphi_j(z)]_0^l}^{=0} - a_2 \langle x'(z,t),\varphi'_j(z)\rangle \\
&\hphantom =+
a_1 \langle x'(z,t), \varphi_j(z)\rangle +
a_0 \langle x(z,t), \varphi_j(z)\rangle && j=1,...,n \\
\langle\dot{\hat{x}}(z,t),\varphi_j(z)\rangle + \langle\varphi_{N+1}(z),\varphi_j(z)\rangle \dot u(t) &= - a_2 \langle \hat x'(z,t),\varphi'_j(z)\rangle - a_2 \langle \varphi'_{N+1}(z),\varphi'_j(z)\rangle u(t) \\
&\hphantom =+
a_1 \langle \hat x'(z,t), \varphi_j(z)\rangle + a_1 \langle \varphi'_{N+1}(z), \varphi_j(z)\rangle u(t) + \\
&\hphantom =+
a_0 \langle \hat x(z,t), \varphi_j(z)\rangle + a_0 \langle \varphi_{N+1}(z), \varphi_j(z)\rangle u(t) && j=1,...,n
\end{align*}](../_images/math/7d8790f4d110cf2006a8b1c737a251029cbd8847.png)
- leads to state space model for the weights
 :
:

input derivative elimination through the transformation:


- leads to

- source code:
from pyinduct.tests import test_examples
if __name__ == "__main__" or test_examples:
import numpy as np
import pyinduct as pi
import pyinduct.parabolic as parabolic
n_fem = 17
T = 1
l = 1
y0 = -1
y1 = 4
param = [1, 0, 0, None, None]
# or try these:
# param = [1, -0.5, -8, None, None] # :)))
a2, a1, a0, _, _ = param
temp_domain = pi.Domain(bounds=(0, T), num=100)
spat_domain = pi.Domain(bounds=(0, l), num=n_fem * 11)
# initial and test functions
nodes = pi.Domain(spat_domain.bounds, num=n_fem)
fem_base = pi.LagrangeFirstOrder.cure_interval(nodes)
act_fem_base = pi.Base(fem_base[-1])
not_act_fem_base = pi.Base(fem_base[1:-1])
vis_fems_base = pi.Base(fem_base)
pi.register_base("act_base", act_fem_base)
pi.register_base("sim_base", not_act_fem_base)
pi.register_base("vis_base", vis_fems_base)
# trajectory
u = parabolic.RadFeedForward(l, T,
param_original=param,
bound_cond_type="dirichlet",
actuation_type="dirichlet",
y_start=y0, y_end=y1)
# weak form
x = pi.FieldVariable("sim_base")
x_dt = x.derive(temp_order=1)
x_dz = x.derive(spat_order=1)
phi = pi.TestFunction("sim_base")
phi_dz = phi.derive(1)
act_phi = pi.ScalarFunction("act_base")
act_phi_dz = act_phi.derive(1)
weak_form = pi.WeakFormulation([
# ... of the homogeneous part of the system
pi.IntegralTerm(pi.Product(x_dt, phi),
limits=spat_domain.bounds),
pi.IntegralTerm(pi.Product(x_dz, phi_dz),
limits=spat_domain.bounds,
scale=a2),
pi.IntegralTerm(pi.Product(x_dz, phi),
limits=spat_domain.bounds,
scale=-a1),
pi.IntegralTerm(pi.Product(x, phi),
limits=spat_domain.bounds,
scale=-a0),
# ... of the inhomogeneous part of the system
pi.IntegralTerm(pi.Product(pi.Product(act_phi, phi),
pi.Input(u, order=1)),
limits=spat_domain.bounds),
pi.IntegralTerm(pi.Product(pi.Product(act_phi_dz, phi_dz),
pi.Input(u)),
limits=spat_domain.bounds,
scale=a2),
pi.IntegralTerm(pi.Product(pi.Product(act_phi_dz, phi),
pi.Input(u)),
limits=spat_domain.bounds,
scale=-a1),
pi.IntegralTerm(pi.Product(pi.Product(act_phi, phi),
pi.Input(u)),
limits=spat_domain.bounds,
scale=-a0)],
name="main_system")
# system matrices \dot x = A x + b0 u + b1 \dot u
cf = pi.parse_weak_formulation(weak_form)
ss = pi.create_state_space(cf)
a_mat = ss.A[1]
b0 = ss.B[0][1]
b1 = ss.B[1][1]
# transformation into \dot \bar x = \bar A \bar x + \bar b u
a_tilde = np.diag(np.ones(a_mat.shape[0]), 0)
a_tilde_inv = np.linalg.inv(a_tilde)
a_bar = (a_tilde @ a_mat) @ a_tilde_inv
b_bar = a_tilde @ (a_mat @ b1) + b0
# simulation
def x0(z):
return 0 + y0 * z
start_func = pi.Function(x0, domain=spat_domain.bounds)
full_start_state = np.array([pi.project_on_base(start_func,
pi.get_base("vis_base")
)]).flatten()
initial_state = full_start_state[1:-1]
start_state_bar = a_tilde @ initial_state - (b1 * u(time=0)).flatten()
ss = pi.StateSpace(a_bar, b_bar, base_lbl="sim", input_handles=u)
sim_temp_domain, sim_weights_bar = pi.simulate_state_space(ss,
start_state_bar,
temp_domain)
# back-transformation
u_vec = np.reshape(u.get_results(sim_temp_domain), (len(temp_domain), 1))
sim_weights = sim_weights_bar @ a_tilde_inv + u_vec @ b1.T
# visualisation
plots = list()
save_pics = False
vis_weights = np.hstack((np.zeros_like(u_vec), sim_weights, u_vec))
eval_d = pi.evaluate_approximation("vis_base",
vis_weights,
sim_temp_domain,
spat_domain,
spat_order=0)
der_eval_d = pi.evaluate_approximation("vis_base",
vis_weights,
sim_temp_domain,
spat_domain,
spat_order=1)
plots.append(pi.PgAnimatedPlot(eval_d,
labels=dict(left='x(z,t)', bottom='z'),
save_pics=save_pics))
plots.append(pi.PgAnimatedPlot(der_eval_d,
labels=dict(left='x\'(z,t)', bottom='z'),
save_pics=save_pics))
win1 = pi.PgSurfacePlot(eval_d, title="x(z,t)")
win2 = pi.PgSurfacePlot(der_eval_d, title="x'(z,t)")
# save pics
if save_pics:
path = pi.save_2d_pg_plot(u.get_plot(), 'rad_dirichlet_traj')[1]
win1.gl_widget.grabFrameBuffer().save(path + 'rad_dirichlet_3d_x.png')
win2.gl_widget.grabFrameBuffer().save(path + 'rad_dirichlet_3d_dx.png')
pi.show()
pi.tear_down(("act_base", "sim_base", "vis_base"), plots + [win1, win2])